
的雷达,它在机器人中主要做感知功能,其与智能驾驶中的感知类似,输出点云,与视觉摄像头做融合定位,下面是详细介绍。
Unitree 4D LiDAR-L2 是一款超高的性价比、安全可靠的 4D激光雷达(3D 位置 +1D 灰度),它具有实现每秒 64000 次的高速激光测距采样能力,可大范围的应用于机器人、智慧城市、智能玩具、物流等领域,支持建图、定位、识别、避障、环境扫描、3D 重建等功能的实现。
·L2 雷达可探测最近 0.05 米、最远距离 30 米的物体(90% 反射率)。
·L2 整机小巧轻便,重量仅 230 克,适合通用的机器人环境扫描、定位、建图、导航和避障。
·L2 拥有出色的超广角扫描能力,视场角(FOV)扩展至水平 360°,竖直 90°,可实现半球形视场角的三维空间探测,应用场景范围可扩大到更多的商用场景。
·此外,L2 还支持负角度模式,在负角度模式下视场角将进一步扩展至水平 360°,竖直 96°,所拓展的 6°视场角对应范围的最远测量距离会稍近一些。
·L2 内置 3 轴加速度和 3 轴陀螺仪的 IMU 模块,支持 1KHz 的采样频率与 500Hz 的上报频率。
·L2 的周向扫描频率为 5.55Hz,竖直扫描频率为 216Hz,有效采样频率为 64000 点 / 秒。
·L2 不仅仅具备优异的性能,还具备高可靠性,满足 -10℃~50℃的工作环境和温度范围以及 IEC-60825 Class 1 人眼安全等级。
·L2 支持控制 3D/2D 模式、正常模式 / 负角度模式、IMU 的使能控制、串口输出 / 网口输出、上单自启动 / 指令启动、灰度使能。出厂默认参数为:3D 模式、负角度模式、IMU Disable、ENET 网口输出、SELF START、GARY ON。
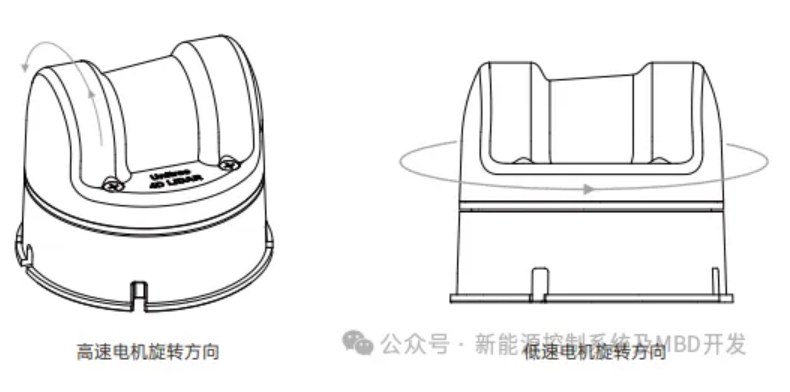
L2 雷达最重要的包含激光发射及测距核心、反光镜、非常快速地旋转电机、低速旋转电机。在工作状态时,按图示视角,非常快速地旋转电机、低速旋转电机的旋转方向如下图所示。
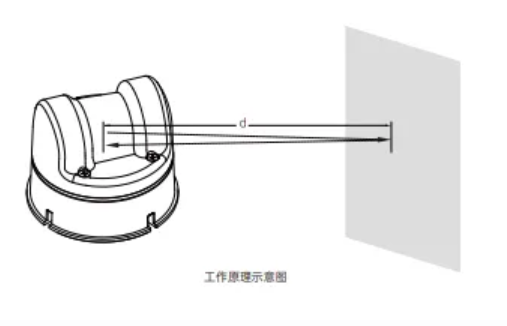
L2 采用了激光飞行时间测距技术,配合高速激光采集处理机构,可实现每秒 64000 次的测距动作。
每次测距动作,L2 发射 ns 级别窄脉冲红外激光信号,该激光信号在照射到目标物体后反射的光会被雷达的激光采集系统接收,经过处理器分析处理,从通讯接口中输出被照射到的目标物体与 L2 的距离值以及当前的夹角等信息。

光学窗口:通过光学窗口向外发散的激光光束能够对视场角(FOV)范围内的物体进行扫描。
出线 出线有三个端子,分别为 DC3.5-1.35 供电头(电源口)、RJ45 母头(网口)、GH1.25-4Y (串口),详细的线序请查阅接口定义章节。
定位槽:共 4 个定位槽,在设计固定支架时,可通过定位槽来提高整机的定位精度。具体尺寸请参考安装尺寸章节。
M3 安装孔:共 4 个安装孔,可使用 M3 螺丝将 L2 固定在合适的位置上。
L2 内部包含高速电机和低速电机,高速电机带动反光镜旋转,实现竖直方向 180°范围的测量, 再通过低速旋转电机带动测量核心部分 360°旋转,以此来实现 360*90°的半球形超广角扫描, 可对雷达上方 360°的三维空间做测量,具体如下图所示。安装时请注意 FOV 的有效范围, 避免遮挡 FOV 区域。
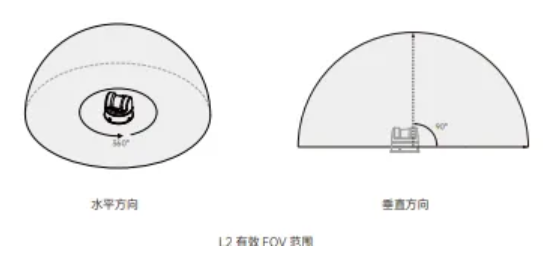
L2 支持负角度模式,在负角度时,水平方向视场角不变,垂直方向视场角拓展至 96°。在负角 度模式下,所拓展的 6°视场角对应范围的最远测量距离会稍近一些。
L2 的点云密度在不同的 FOV 区域内有所区别,越靠近中心点云密度越大,可参考下图。
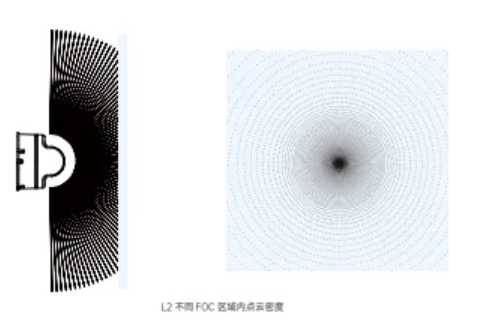
L2 正上方视野的量程最远。此外,L2 正上方会有一个极小角度的视野空缺区域,为算法校正后的正常现象。

1. 价格:宇树L2的售价范围在999-1299元,相比来说较低,具有较高的性价比。
2. 体积小巧:尺寸为75x75x65mm,重量为230g,适合需要轻便和小型化的应用场景。
3. 机械式扫描:虽然机械式扫描的可靠性较高,但宇树L2采用的是双电机转镜,可能在某些特定的程度上提高了扫描的稳定性和精度。
最大测距仅为15m@10%,相比其他激光雷达(如览沃MID-360和禾赛JT128)的最大测距要短,限制了其在远距离测量中的应用。
分辨率为0.64°,相较于其他高分辨率激光雷达(如速腾Airy的0.4°(H)x0.94°(V))表现一般。
点频较低点频为2.16万点/秒,相较于点频较高的激光雷达(如速腾Airy的86万点/秒),在动态场景的感知能力上有所不足。
综上所述,宇树L2激光雷达在价格、体积和功耗方面具有优势,但在测距、分辨率、线数和点频方面存在一定的劣势,适合在价格敏感且对性能要求不高的应用场景中使用。

功能:该总成负责激光雷达的水平方向旋转运动。通过电机驱动和轴承的支撑,实现激光雷达在水平面上的扫描。
功能:保护激光雷达的内部组件,防止灰尘、水分和别的环境因素的侵入,起到防护作用。
功能:与上盖一起,提供完整的壳体,保护内部电路和机械部件,确保设备正常运行。
功能:控制和处理激光雷达的数据。包括信号的接收、处理和传输等,是激光雷达的核心控制部分。
功能:该总成涉及激光发射和接收的旋转部分。转子负责带动激光发射器旋转,受电线圈则用于接收反射回来的信号。
功能:起到密封和减震的作用,确保各个部件之间的连接牢固,同时防止松动和减少震动对设备的影响。
功能:用于固定和保护内部组件,提供稳定的支撑,确保各部件在设备正常运行过程中的稳定性和可靠性。
功能:能够覆盖指定的扫描范围。用于固定扫描模块,并通过电机驱动实现扫描模块的运动,确保激光束
功能:汇聚透镜用于将发散的激光束汇聚成平行光,或者将平行光汇聚到接收器上,提高激光束的利用率和接收信号的准确性。支架用于固定透镜。
功能:激光器负责发射激光束,接收单元负责接收反射回来的激光信号,通过测量信号的时间差来计算距离。
功能:与下电路板一起,共同完成激光雷达的数据处理和控制任务,包括信号的数字化、滤波、分析以及数据传输等。
因为为简单拆解,从工艺角度,与目前车规级别的有一定差别,其轴承,密封还不错,一线大厂产品。电机因暂未破坏,故看不到铜线其定子的好坏,后续弄好,分享给大家!
其性能及软件,需要下载官方SDK做验证,故但从结构,工艺,应该算可以,其与汽车的激光雷达,差异不大。
【科技和移动性亮点】罗姆半导体发布用于高级驾驶辅助系统激光雷达的高输出功率激光二极管
“LiDAR激光雷达”为智慧物流赋能,罗姆“激光器+GaN”带来安全精准
上一篇:能生产3nm!中科院成功研发全固态DUV光源技术:完全不同于ASML
下一篇:在英特尔® 酷睿™ Ultra AI PC上用NPU部署YOLOv11与YOLOv12






